🕵️♂️ Object Detection in Simulation
Once the planner is set up and the SMB simulation is running, you can begin experimenting with object detection. Ensure that the object_detection package is built. If it isn’t, use the following command:
# On the host PC
catkin build object_detection
Source the workspace again and launch the SMB launch file.
# On the host PC
roslaunch smb_gazebo sim.launch
# If you see the message "First IMU Received",
# everything started without any problem
Next, launch the object detection locally with these parameters for simulation:
gpu="off": Runs detection on the CPU.model_path="": Don’t set this parameter if you want to use the pre-installed model. If you have a downloaded model, specify its path.model="yolov5l6": Selects the pre-installed YOLOv5 model.object_detection_classes="[0,1,2,10]": Populate this list with the IDs of objects added to the Gazebo scene. If you leave this empty, it will try to detect all objects in the dataset for the simulation. To see what numbers correspond to what items, check out the Artefact Detection Tutorial page and look for the YOLOv5 Supported Object Classes section. The example[0, 1, 2, 10]corresponds to person, bicycle, car, and fire hydrant.
Note: The `object_detection_classes` parameter is only effective on the real robot or for non-docker users. Docker users use ONNX for detection instead of Torch, as this makes the Docker image smaller. Consequently, all objects will be detected and one cannot select what objects to detect.
To launch the detection pipeline locally, run:
# On the host PC
roslaunch object_detection object_detection.launch gpu:=off model:=yolov5l6
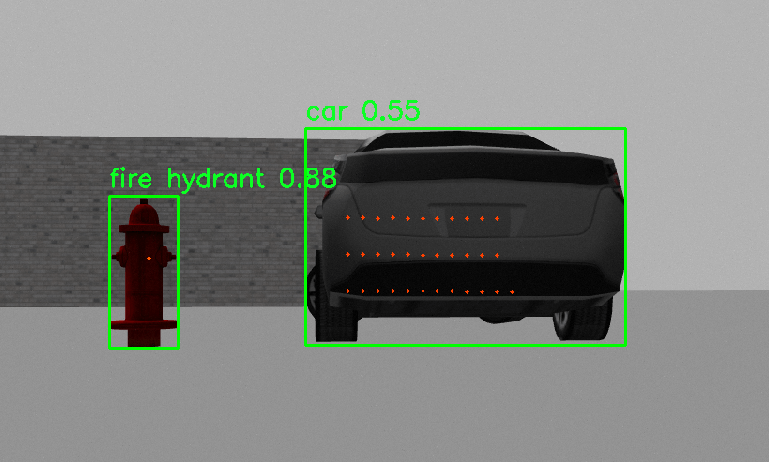
To view the bounding boxes and get more information about the detections use the following two commands:
# On the host PC
rosrun rqt_image_view rqt_image_view
Then select the following topic to see the bounding boxes in the image:
/object_detector/detections_in_image
To get more information like position, classification, etc. subscribe to or echo the following topic:
# On the host PC
rostopic echo /object_detector/detection_info
For more information, please check out the Artefact Detection Tutorial.
🛠️ Adding Artifacts in Gazebo
If you want to add artifacts in Gazebo, you can do so easily by following these steps:
- Open Gazebo and launch your simulation environment.
-
Click on the “Insert” tab located on the left side of the Gazebo interface.
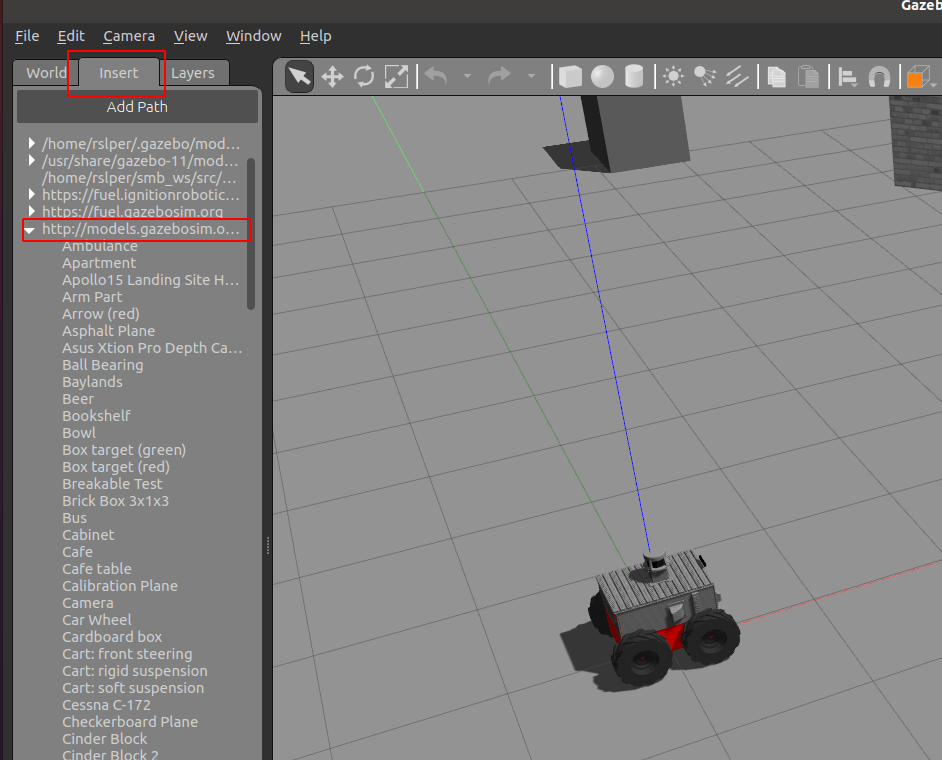
- Browse through the list of available objects and models.
-
Select the desired object (e.g., cars, boats, etc.) and click to insert it into your simulation environment. In this example, we selected a prius!
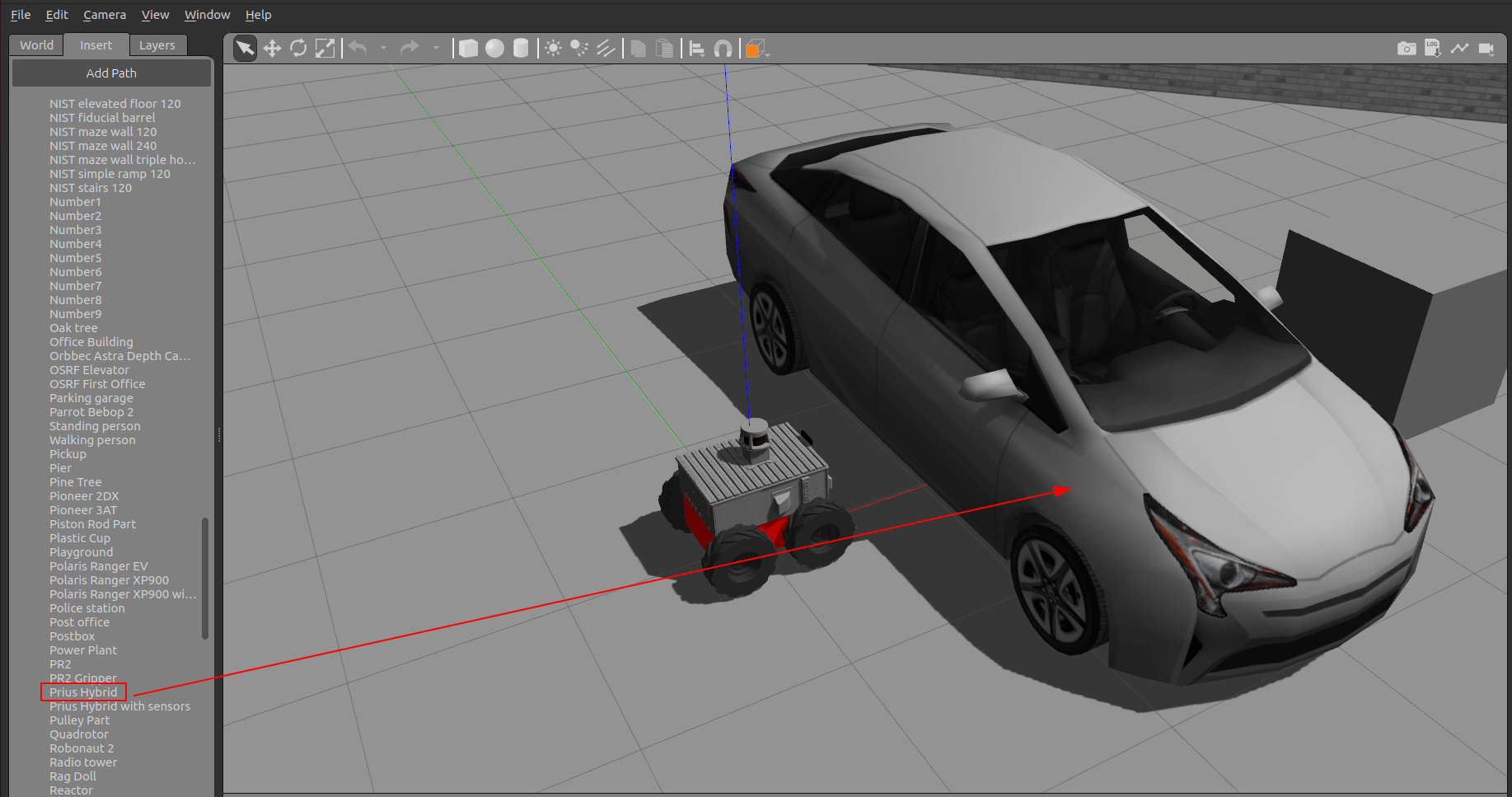
-
Position the object as needed within the simulation, and start the object detector to see the magic!
This will allow you to customize your simulation environment by adding various objects for more comprehensive testing and development. Make sure the object you are trying to detect is part of the dataset that YOLOv5 supports!