🗺️ Exploration
Make sure that the smb_exploration is built. If not, run:
# In the host PC
catkin build smb_exploration
🧭 Lower Level Planner
Launch the default simulation environment:
# In the host PC
roslaunch smb_gazebo sim.launch
Launch the slam:
# In the host PC
roslaunch smb_msf_graph smb_msf_graph.launch use_sim_time:=true
Launch the local planner and path follower:
# In the host PC
roslaunch smb_navigation navigate2d_cmu.launch use_msf:=true global_frame:=world_graph_msf state_estimation_topic:=/transformed_odom launch_far_planner:=false
At this stage you should be able to set the local way points for SMB to follow as described in Navigation section.
🗺️ Exploration with TARE Planner
Launch TARE Planner for exploration:
# In the host PC
roslaunch smb_exploration smb_rss_tare.launch rviz:=false
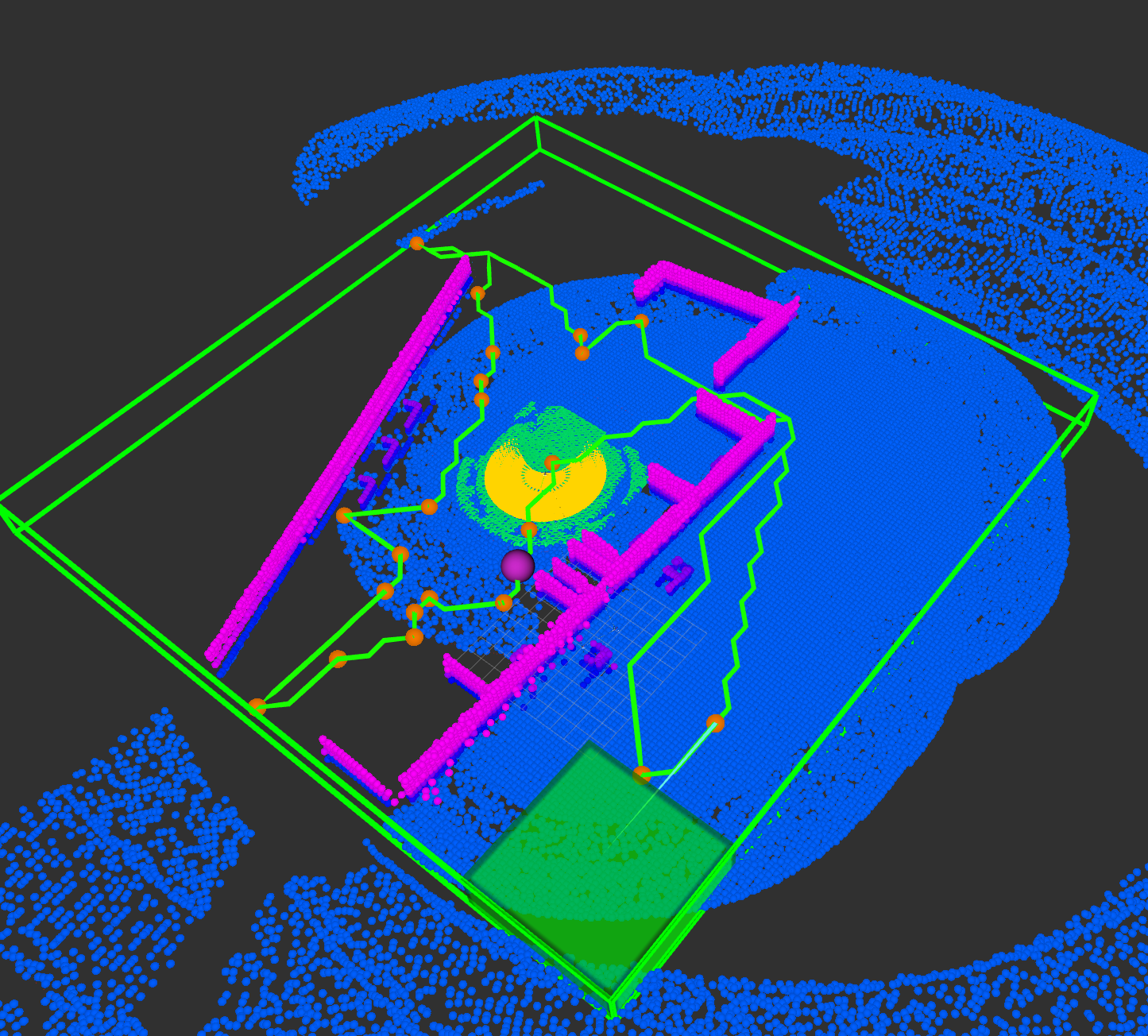 Now you should see SMB following the green global exploration path.
Now you should see SMB following the green global exploration path.