📋 Frequently Asked Questions
This page covers the most frequently asked questions that arise when using the SMB simulation and working on the real robot.
For recent and past queries, please refer to the GitHub Issues of this repository.
- 📂 How can I transfer a file to a USB3 drive (Ubuntu)?
- 🗺️ How to prepare a processed pointcloud for localization and 2D grid map creation?
📂 How can I transfer a file to a USB3 drive (Ubuntu)?
From How to access a usb flash drive from the terminal? - askubuntu
🔍 Figure out the name of the USB stick
Most likely, the device name of the USB stick is sda1, but it could be different. To find the name of the USB drive, execute:
lsblk
🗂️ Create a mounting point
Create the folder where the USB will be mounted (essentially a folder linked to the USB). Create the following folder if it does not already exist:
sudo mkdir /media/usb
🔗 Mount the USB
Mount the USB drive using the following command:
sudo mount /dev/sda1 /media/usb
⚠️ Unmount!
Remember to unmount the USB stick before disconnecting it; otherwise, you may corrupt it!
sudo umount /media/usb
🗺️ How to prepare a processed pointcloud for localization and 2D grid map creation?
modified from Interactive Segmentation Tool - CloudCompareWiki
💾 Download the CloudCompare software
You can find the suitable version here for your OS.
✂️ Segment pointcloud with the tool
-
Load the built pointcloud (.pcd format) in CloudCompare via the
File -> Openmenu or dragging the pointcloud. -
Select a suitable viewpoint and launch the tool via the
 icon in the main upper toolbar or the
icon in the main upper toolbar or the Edit > Segmentmenu.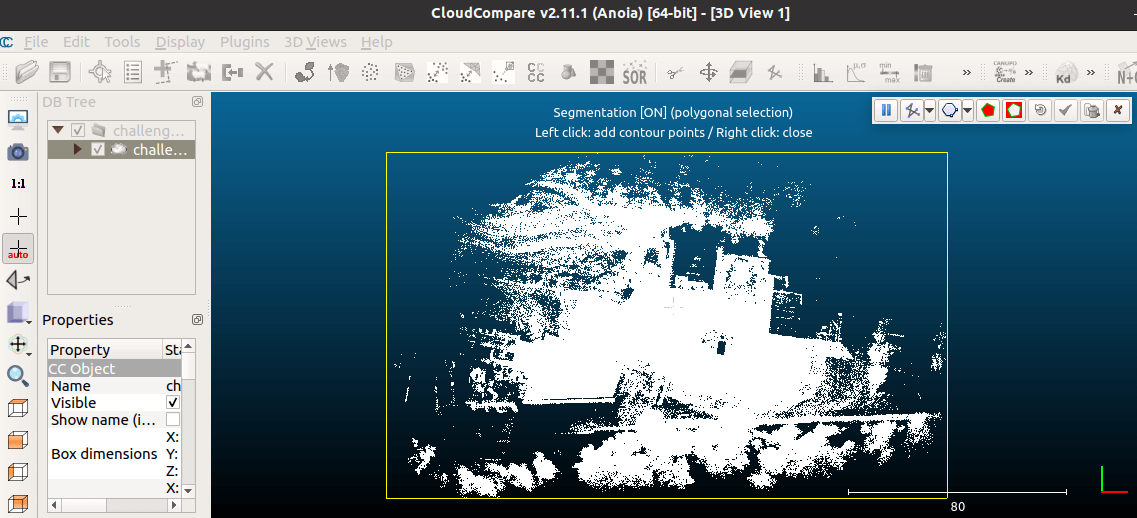
-
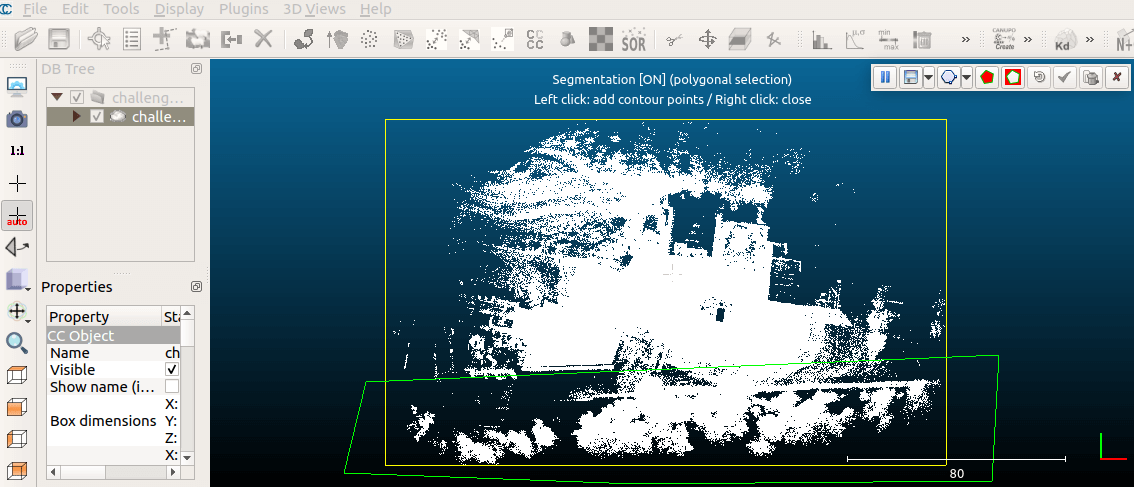
Use left click to add a contour to contain a region of interest (polygon or rectangle) and right click to close the region.
-
Once the polygon/rectangle edition is finished, choose whether to keep points inside (
 ) or outside (
) or outside ( ) the polygon. The other points will disappear (as well as the polygon) after clicking the check sign.
) the polygon. The other points will disappear (as well as the polygon) after clicking the check sign.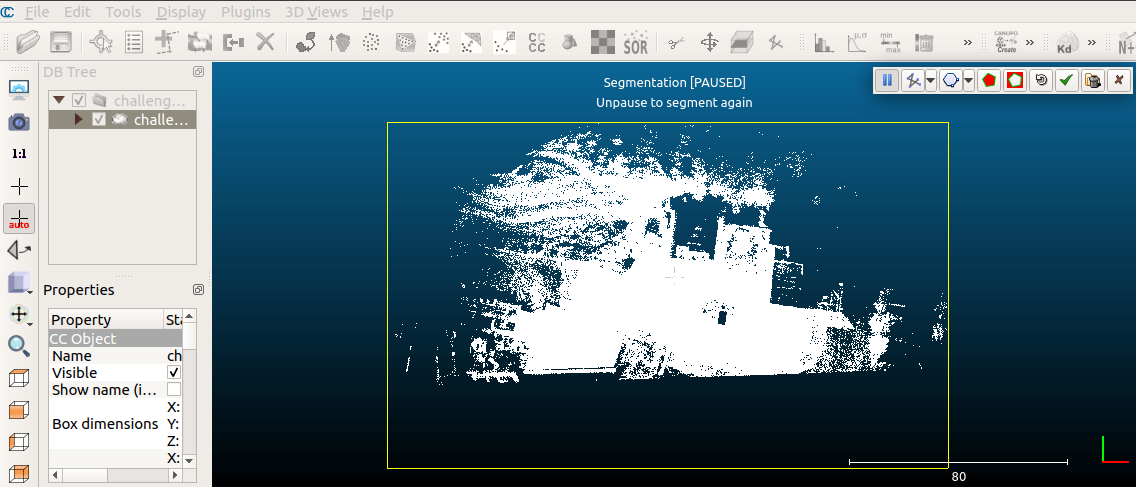
-
Segment until the clean pointcloud is achieved and select the segmented one to save as
.pcdformat (Point Cloud Library cloud).You could achieve better colorized visualization by using the
Edit > Colors > Height Rampmenu.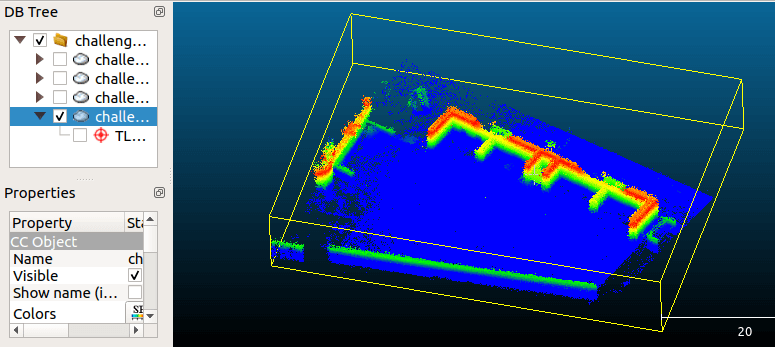
Colorized visualization of segmented pointcloud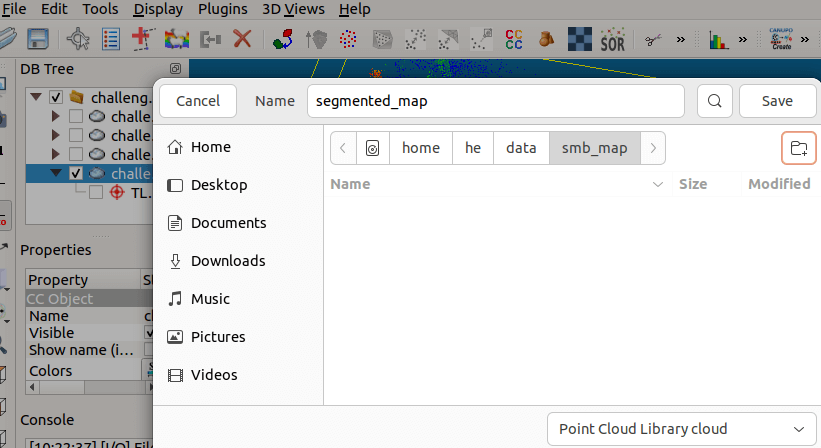
Export segmented pointcloud as.pcdformat (Point Cloud Library cloud)