Using Docker for Simulation
Documentation of the SuperMegaBot (SMB) Docker for the ETHZ Robotic Summer School.
To use the SMB Docker, basic knowledge of Docker is needed. Please check the official website to learn how to build, save, reconnect etc.
- Setting up Docker
- Setup Visual Studio Code for use with Docker container
- (Re-)connecting to the Docker container
- How to use the simulation in the Docker container
- Known issues
Setting up Docker
Linux
- Install Docker by following the official website
- Clone the repo into a directory on your host computer
- Run the bash file to create the container
# Go the directory where you downloaded the repo to
cd <path/to/repo>
# Activate Container
./create_container.bash
This will automatically setup your system to later run the docker and download the pre-compiled image from dockerhub. Once downloaded, the script starts a container called smb_container that can be used to run the SMB software (see reconnecting to the docker container).
Windows
- Install Docker Desktop by using the official website
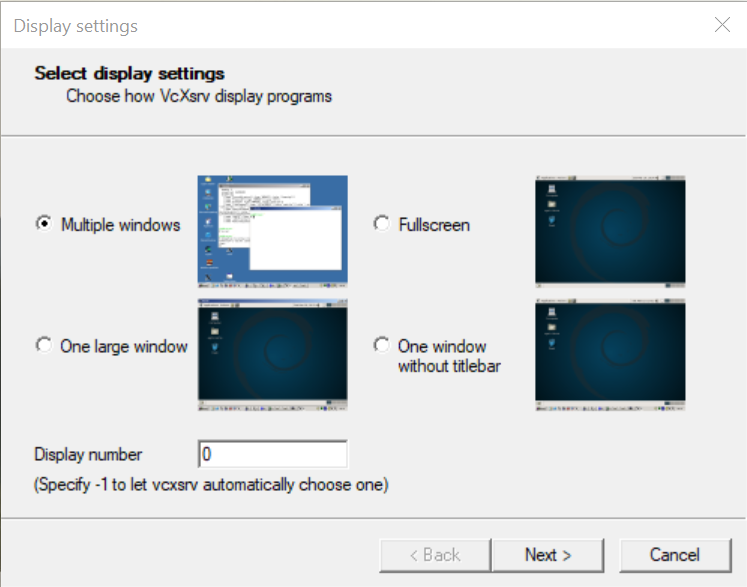
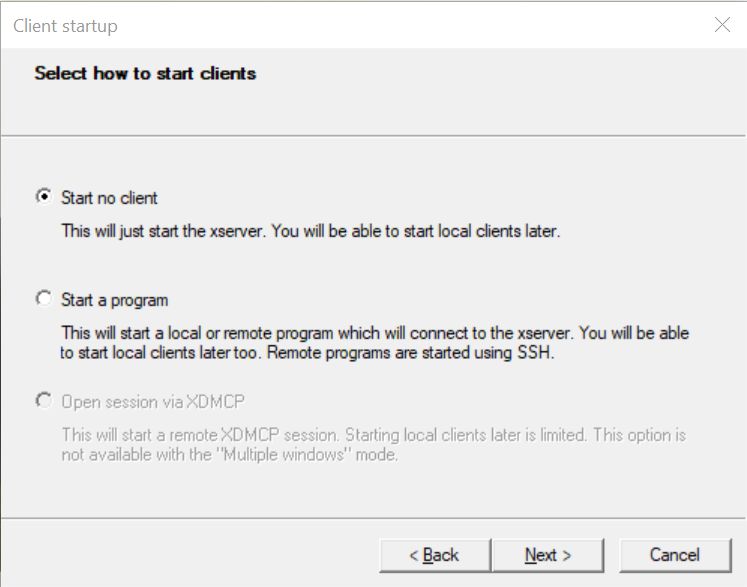
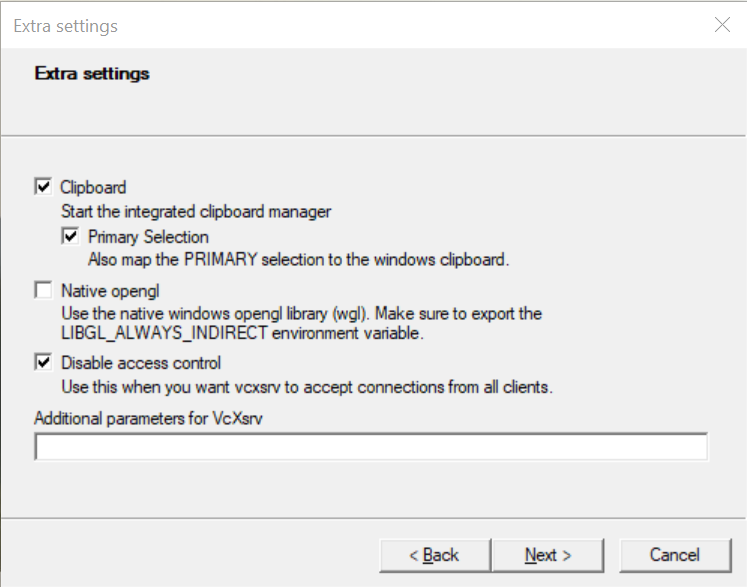
- Install VcXsrv here
-
Launch VcXsrv and put the settings as in the pictures
- Open the powershell and run
# Run docker
docker run -it --env="DISPLAY=host.docker.internal:0.0" --volume=smb_volume:/home/catkin_ws/src --net=host --name smb_container ethzrobotx/smb_docker bash
- To exit the container type
exitin the terminal
Setup Visual Studio Code for use with Docker container
Visual Studio Code is a powerful integrated development environment that even allows accessing code inside a Docker container. Usage of Visual Studio is not necessary.
- Open Visual Studio Code and install the dev - containers extension.
- Click on the extension on the bottom left corner and attach to the previously created container.
- When the new window opens install the C/C++ and Python extension from Microsoft inside the container. This is needed in order to get autocompletion.
- The catkin workspace is located in /home/catkin_ws
(Re-)connecting to the Docker container
Once you have setup the smb_container, you can create a terminal (bash shell) by running
docker exec -it smb_container bash
There is no need to run the script create_container.sh anymore.
If you closed all running instances of bash in the smb_container, you might need to start it again by running
# start docker container
docker start smb_container
# create a terminal (bash) in the container:
docker exec -it smb_container bash
The latter command can be repeated multiple times to create several terminals in the same container.
How to use the simulation in the Docker container
If you want to run the simulation you can follow the how to run SMB software and run the commands given there in a terminal in the smb_container. I.e.
# create a terminal (bash) in the container:
docker exec -it smb_container bash
In the then so created terminal, run:
roslaunch smb_gazebo sim.launch
Known issues
/tmp/.docker.xauth
It might happen that after rebooting your system you will get the following error:
Error response from daemon: failed to create shim task: OCI runtime create failed: runc create failed: unable to start container process: error during container init: error mounting "/tmp/.docker.xauth" to rootfs at "/tmp/.docker.xauth": mount /tmp/.docker.xauth:/tmp/.docker.xauth (via /proc/self/fd/7), flags: 0x5000: not a directory: unknown: Are you trying to mount a directory onto a file (or vice-versa)? Check if the specified host path exists and is the expected type
Error: failed to start containers: smb_container
In that case, try to run the script restart_container.sh from the smb_docker repository.